前言:超速停车是主机自动保护性停车的重要参数之而且是没有预警和越控的参数,其重要性不言而喻。
一旦出现该信号,不管主机是否真的超速还是转速传感器引发的误操作,必定自动停车。
对救助船舶来说,如果在救助中遇到此报警是异常危险的。
因此,一旦出现类似报警,应予以足够重视,尽量在最短时间内解决问题,消除隐患。

一、故障概述
该轮为2009年出厂的新型8000KW救助船舶,双机双桨可变螺距(CPP),配备艏侧推2台、艉推1台,操纵性能良好,具备强大的海上救生、消防和拖带等能力。
主机型号为瓦锡兰W9L32,该主机机带自动操作系统为UNICC2嵌人式发动机管理系统。

该系统采用模块化设计,通过CAN总线进行传感器信号和其他信号的安全传输,实现柴油机的启动1停止管理、柴油机安全和速度/负载控制相关的所有任务。
该操作系统主要包括:
LCP (本地控制面板)、MCM ( 主控制模块)、10M(输人输出模块)、ESM(安全控制模块)、PDM(配电模块)等几部分组成。
其中ESM模块主要实现柴油机的基本安全控制,并接受外部传感器信号触发柴油机的保护性自动停车。
故障1:
某日,该轮主机在停止状态时,集中监控报警出现"左主机超速停车(ESM模块)”、“左主机滑油备用泵自启”显示,且滑油备用泵真实启动,主机状态显示“SHUTDOWN"。
当值人员在无法手动关闭备用泵后,立即“RESET SHUTDOWN",后主机状态显示复位完成,报警消除,备用泵亦可关闭。
由于此次报警发生时,主机为停止状态,且复位后一切正常,便经验性认为“系统误报警”,未做深究。
故障2:
一周后,该轮在训练时,左主机正常备车,启动成功运转约3min后,主机自动停车,且集中报警显示“左主机ESM故障报警”、“左主机超速停车( ESM模块)”,主机状态仍显示为“SHUTDOWN"。
当值人员首先去机旁观察ESM模块报警指示灯状态,发现“OVERSPEED SHUTDOWN"红灯常亮,主机机旁显示器亦显示为超速停车状态。
后复位,一切恢复正常,再次启动主机,运转良好。
二、故障分析
分析故障2,非常矛盾。
首先确定主机当时并未实际超速(飞车),转速稳定为750rpm,一切参数正常,且海况条件良好,不存在螺旋桨浮出水面空转的情况,但超速报警也确实发生,并触发了主机自动停车。
此信号来自何处?
分析此主机关于ESM模块转速测量和超速报警的原理,本机速度通过两个独立的速度传感器(ST173/ST174 )测量,它们具有独立的供电电路和独立的传感器故障检测电路。速度传感器的频率将转换为与转速成比例的模拟电压。
当任意传感器检测到柴油机转速达到115%额定转速时,其频率脉冲信号所对应的电压值触发ESM中的内部超速行程电路,主机自动停车保护,并锁定于SHUTDOWN状态,直至人工复位。
再联想到故障1的发生,分析得出以下逻辑图(如图1):
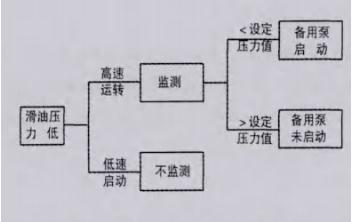
图1 滑油压力监测逻辑图
由逻辑图可以得出,主机滑油备用泵启动的前提条件是控制系统检测到滑油压力低于设定值,而监测滑油压力的前提又是主机达到高速,正常运转。
既然如此,为什么主机在停机的时候,还会出现监测滑油压力,还会出现备用泵启动的情况,又是矛盾?
问题又回到了故障1中“左主机超速停车(ESM模块)"这一故障报警,做如下思考:
系统接收到超速信号处理器认为主机在运转一滑油压力进入监测一主机实际未运转,无滑油压力一滑油备用泵启动。
如此,故障1便得以解释。
综合故障1与故障2,问题都指向了“超速停车”这一未发生但却实际存在的故障报警。
再次分析ESM中超速报警的逻辑图,可得:
a.主机实际未超速,信号源故障排除。
b.转速传感器偶发性故障,脉冲信号发射错误。
c.ESM模块fU转换错误或是模块内部不稳定故障。
由此可以推知故障原因或为传感器或为ESM模块本身,又因为ESM模块本身的传感器检测线路未检测出“转速传感器故障报警”,故决定先更换ESM模块,再进行进一步观察和排除。
更换此模块后,主机备车、启动无误,但在正常运转约6h后出现“左主机ESM故障报警”,在0.5h内此故障频繁出现、消失,但最后保持在此报警状态。
在此期间,机旁观察ESM指示灯,发现“speed diff. fail" 与“Pulse2”指示灯闪亮,最后“Pulse2"熄灭,“speed diff.fail”处于常亮状态,报警存在,但完成后故障复位,再次启动故障消失,此为故障3。
“speed dif. fail"(转速偏差大报警)出现的条件是两转速传感器(ST173/ST174)之间比较偏差>5%时输出有效值;
而“Pulse2”熄灭更是表明脉冲通道2(ST174)无输入信号至ESM模块内部。
综合以上出现的三个故障,其共同特性都与转速传感器这一I/O通道有关,加上故障3更换过ESM模块,故此基本可以断定左主机故障来源与转速传感器2(ST174)有关。
为进一步确定是否为ST174引发的故障,再次启动主机,观察主机PCU(主推进装置)控制箱内接收转速信号的PLC单元P3(QD62E,此单元为高频计数器)的脉冲指示灯,发现尽管机旁显示传感器无误,ESM无误,但该指示灯在主机正常运转后仍有一段时间的慢闪,最后变为常亮,与其在高速下一直保持常亮的状态有误。
故可以断定:
该机转速传感器为偶发性故障,频率测算有偏高或是偏低的失误,应予以更换。
三、解决方法
更换该传感器后,主机经多次试车,故障未出现,问题解决。该传感器为感应接近PNP类型。
速度传感器的频率将转换为与转速成比例的模拟电压。
安装形式如图(下图2):

图2 转速传感器安装示意图
安装该传感器时应注意以下几点:
a.更换此元件时,应将柴油机机旁控制箱断电,确保人员与电气元件安全。
b.传感器旋人支架时应注意后面电线跟转,避免打结断掉。
c.传感器与齿间间隙一定要用塞尺量好,在规定值范围内,过大与过小都可能造成传感器的过速损坏。
四、意义
在处理该问题时,故障本身一直在变化,而且出现都是闪发性的,且充满了矛盾。
笔者有以下几点体会与各位同行探讨:
其一,作为轮机管理人员,当不确定故障出现时,在驾驶人员允许的情况下,不要急于复位消警。
应该先弄清楚报警来自何处,故障发生时的原始状态。
好比警务人员处理案情时“保护第一现场”,非常重要。
其二,作为轮机管理人员,应该不放过任何一个故障的出现,因为每一个故障的出现都是事故的隐患。
如若此次,面对可以复位,若有若无的报警,我们听之任之,当自动停车故障发生在救助或是航行避让时,危险可想而知。
其三,故障的发生很多都是无规律性的,像上述的超速停车报警,明明未实际发生却实际存在。
面对此类故障,当我们正常的推理打不开局面的时候,不如换个思路,一步步排除。
哪怕是有关的备件一个个更换上去,毕竟作为轮机管理人员,我们可以不知道故障的原因,但必须要让机器动起来。
来源:航运精英圈 原作者:佳通运输部东海救助局 叶小明


